
今天,波士顿动力(Boston Dynamics)接连公开两个新视频,展示了SpotMini和Atlas机器人的更多技能。
其中一个视频中,波士顿动力演示了SpotMini小狗机器人如何通过自动导航在办公室和实验室中自由穿行,它能够以非常快速的反应速度避开障碍物,甚至会爬楼梯。
根据官方介绍,SpotMini的正面、背面和侧面安装有摄像机。在测试之前,机器人先被手动驱动在设置的路线上走过一遍,这是为了让机器人自己创建空间地图。在自主运行期间,SpotMini使用摄像机的数据将其自身在空间地图中定位,同时检测并避开障碍物。
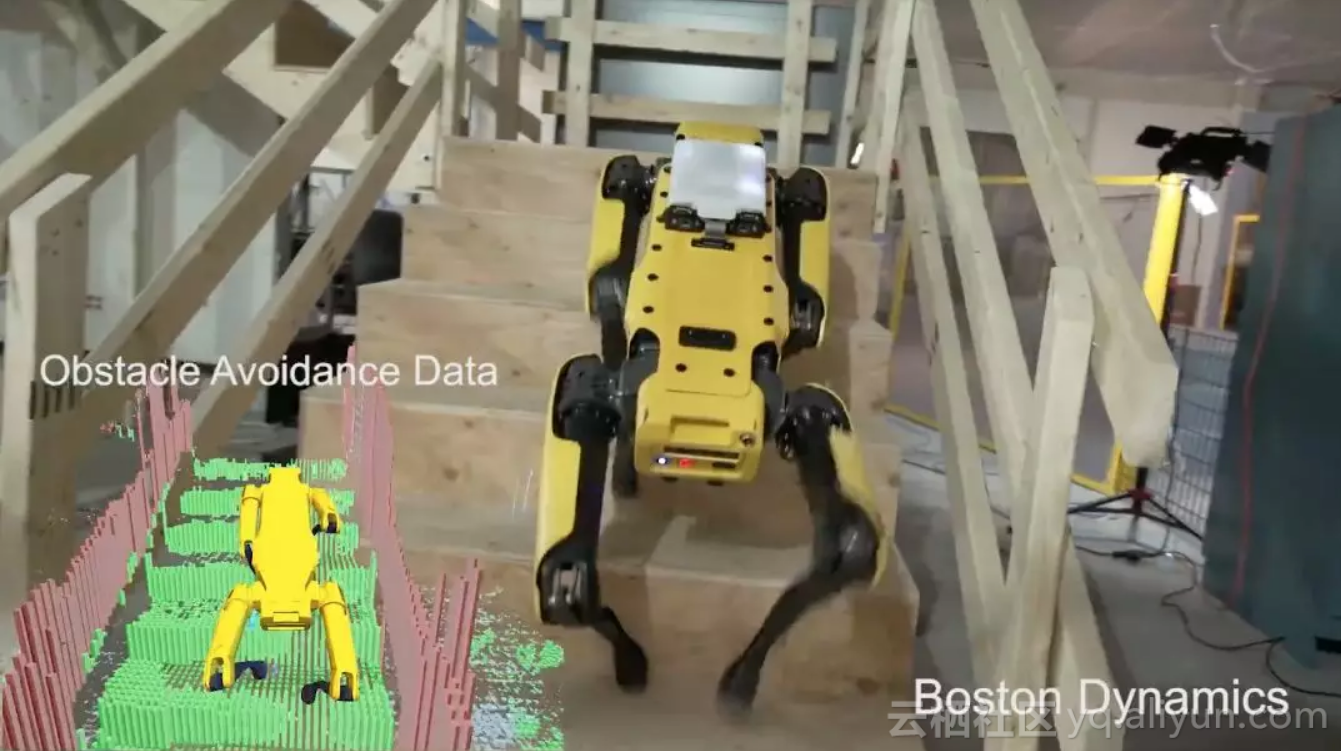
更令人赞叹的是,SpotMini毫无障碍地走下了楼梯,如真实的小狗一般。
这条路线的总步行时间只需6分钟。视频的开头,操作员按下了“GO”,机器人马上自行启动。视频中显示的QR码用于衡量效果,而不是导航。
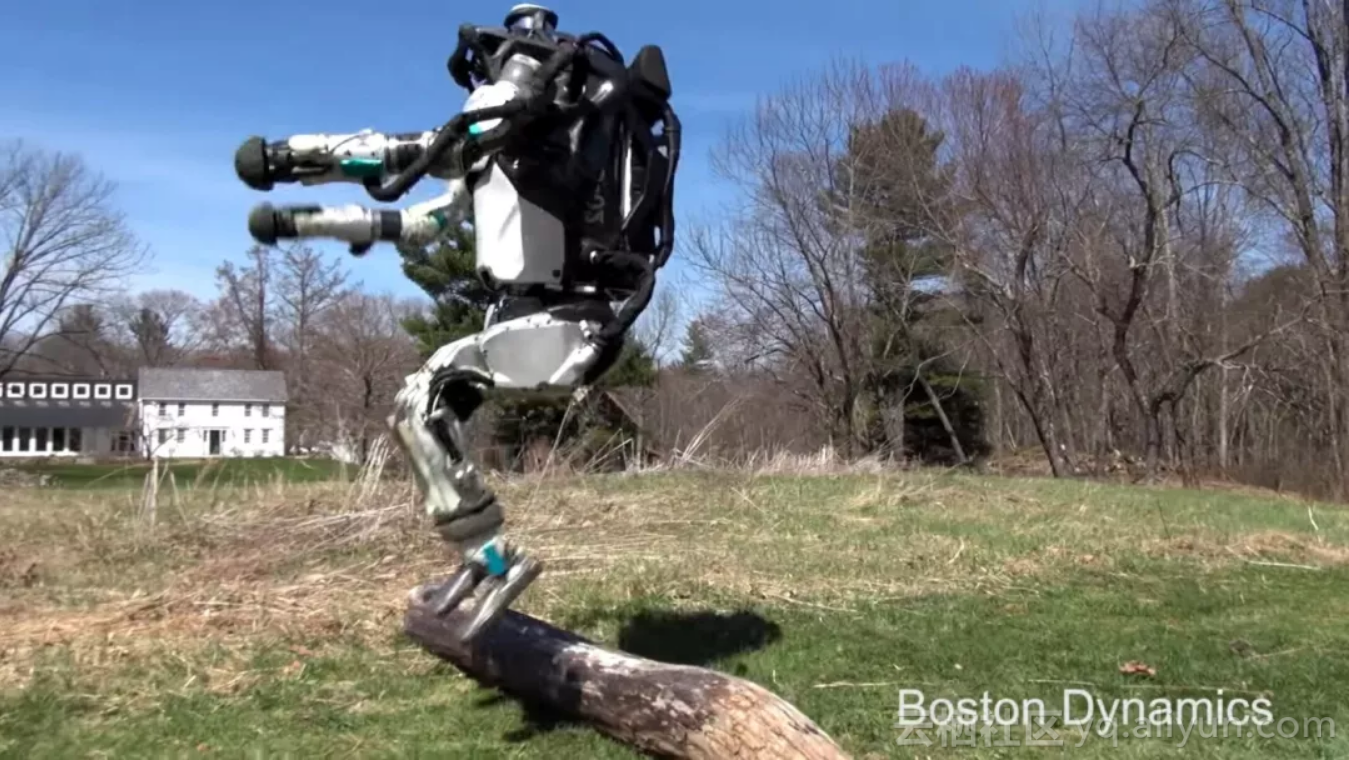
另一个视频展示了波士顿动力的最新版Atlas机器人在田野间慢跑。Atlas在开阔的地形上不受限制地慢跑着,并轻松跨过一段木头,清除了一个小障碍,同样令人印象深刻。

Atlas去年展示了令人震撼的“后空翻”绝技,显示出与人类体操运动员相媲美的平衡感。
当时视频刚刚在YouTube上发布,特斯拉、SpaceX等的创始人马斯克发推说:
“这没什么。几年之后,这个机器人会因为移动得太快,你需要闪光灯才能看到它。甜蜜的梦…”
SpotMini,跑得真的有点快。
波士顿动力公司接连发布2个最新视频可能仅仅是巧合,就在今天,政府官员,行业主管和研究人员们正聚集在白宫参加人工智能峰会。今天的发展似乎完全符合“终结者”电影的开场场景。
原文发布时间为:2018-05-11
本文来自云栖社区合作伙伴新智元,了解相关信息可以关注“AI_era”。
继续阅读与本文标签相同的文章
-
[译] 2019 React Redux 完全指南
2026-05-19栏目: 教程
-
[译] Java 和 etcd: 因为 jetcd 最终走到了一起
2026-05-19栏目: 教程
-
[译] Spring 的分布式事务实现 — 使用和不使用 XA — 第二部分
2026-05-19栏目: 教程
-
[译] Android 生命周期备忘录 —— 第四部分:ViewModel、半透明 Activity 及启动模式
2026-05-19栏目: 教程
-
Docker容器实战(二) -"鲸鱼"公司粉墨登场
2026-05-19栏目: 教程