
这段时间一直忙着开发基于.NET Micro Framwork系统的远程医疗系统(参见:http://space.cnblogs.com/group/topic/41835/),所以隔了近一个礼拜的时间,才有精力继续研究PWM驱动智能小车的问题。
以前对步进电机和直流电机的控制了解不深,以为仅对步进电机而言,才能进行PWM控制,及到购买相关的驱动板和步进电机后,才发现由于驱动板的原因,控制步进电机的方向、速度只能通过IO控制,相关内容请参见我以前写的博文《步进电机控制(非PWM模式)》。
在介绍具体的控制代码之前,为了便于更深入的了解PWM控制直流电机的机制,我们先粗略了解一下H桥驱动直流电机的原理。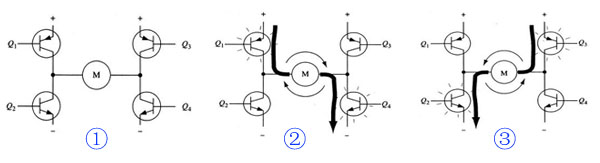
(1)、H桥式电机驱动电路包括4个三极管和一个电机;
(2)、导通Q1和Q4,电流从Q1经电机流到Q4,电机顺时针转动;
(3)、导通
继续阅读与本文标签相同的文章
下一篇 :
百度之星之D:共同狂欢
-
【STM32 .Net MF开发板学习-28】中文显示(WPF方式)
2026-05-23栏目: 教程
-
让TinyGUI库支持模拟器
2026-05-23栏目: 教程
-
Docker入门基础之镜像使用
2026-05-23栏目: 教程
-
红牛开发板模拟器简要说明_V1.0
2026-05-23栏目: 教程
-
.NET Micro Framework 用户程序升级说明
2026-05-23栏目: 教程