
我前段时间写了《用PWM驱动智能小车》和《红外遥控器编码识别》两篇博文,分别介绍了如何用PWM驱动直流电机及红外遥控器编码识别,这一次我们把二者结合起来,用红外遥控器遥控智能小车。
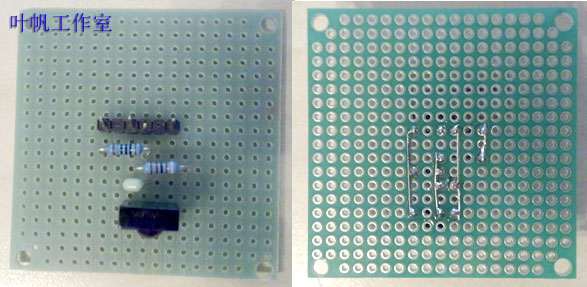
在《红外遥控器编码识别》中,我们用面包板搭建简单的电路,来验证红外接收信号,但是放在小车上是不行的,相关器件我们需要进行焊接,最终完成图如下。
我们把智能小车和红外板拼装在一起,最终完成图如下: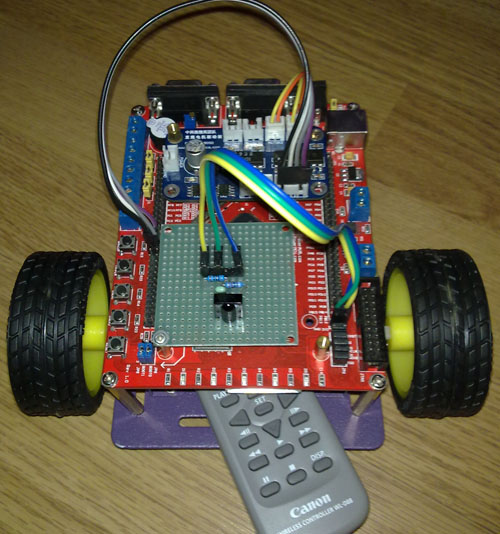
需要注意的是,PWM信号输出时,对红外接收信号有比较大的干扰,所以尽可能让两路信号离的远一些,杜邦线质量也要好一些。
我们把小车分5种状态:前进、后退、左转、右转、停止
1、 前进代码
static void MoveForward() { Lc.Write(true); pwm.Star继续阅读与本文标签相同的文章
-
【.Net MF网络开发板研究-03】获取雅虎天气(HttpClient示例)
2026-05-23栏目: 教程
-
【.Net MF网络开发板研究-02】Http Server功能演示
2026-05-23栏目: 教程
-
【.Net MF网络开发板研究-01】IP地址设定及简单web演示
2026-05-23栏目: 教程
-
.NET Micro Framework 4.2 beta 源码探析
2026-05-23栏目: 教程
-
【STM32 .NET MF开发板学习-29】摄像头蓝牙图像远程获取
2026-05-23栏目: 教程